|
Un
photodétecteur à quatre quadrants pour mesurer la stabilité du pointage
laser
Doug Marett (2012)
(A propos de l'auteur)
version pdf
ici
Remarque:
Une version améliorée du détecteur de quadrant décrit ici est
maintenant disponible sur notre boutique
en ligne.
Introduction
La
stabilité du pointage de faisceau est une qualité importante d'un
laser. La
dérive angulaire dans un faisceau laser peut être une préoccupation
sérieuse dans les expériences d'interféromètre où une telle dérive peut
provoquer des décalages de franges anormaux, ce qui fausse les
résultats. Nous
décrivons ici un photodétecteur à 4 quadrants que nous avons construit
pour mesurer la dérive du faisceau angulaire dans un système laser
HeNe. Nous
examinons ensuite le degré de dérive de l'angle de sortie d'un couple
de tubes laser HeNe au cours des heures et des jours, et quelles sont
les causes sous-jacentes de cette dérive.
Le
principe de fonctionnement de la photodiode à 4 quadrants:
L'unité
de photodiode est constituée de 4 surfaces photosensibles en silicium P
sur N séparées par un petit espace, comme le montre la figure 1. Dans
notre dispositif, cet espace est de 42 um. Le
faisceau laser est généralement pointé vers le point mort entre les 4
quadrants et le diamètre du faisceau est sélectionné pour s'adapter à
l'intérieur de la zone quadrant totale. Bien
que la lumière tombe sur les quatre quadrants, la différence entre les
quadrants gauche et droit (sortie X) et les quadrants supérieur et
inférieur (sortie Y) peut être ajustée à zéro en centrant le faisceau,
alors que le SUM est au maximum. Les
tensions de sortie des dispositifs X et Y deviennent ainsi très
sensibles aux légères déviations de la position du faisceau par rapport
à ce réglage centré initial. D'autre
part, la valeur SUM peut être utilisée pour mesurer les variations de
l'intensité du faisceau, ce qui permet de corriger les valeurs de
sortie X et Y pour les variations de tension dues aux fluctuations
d'intensité plutôt qu'aux déviations réelles du faisceau.
Fig.
1: Un détecteur de photo à 4 quadrants de First Sensor (anciennement
Pacific Silicon) QP50-6-TO8

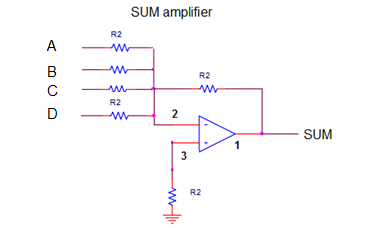
Afin de présenter les sorties des 4 quadrants comme
X, Y et SUM, il faut d'abord amplifier les sorties des quadrants
individuels, puis les combiner en utilisant une série d'amplificateurs
de somme et de différence (pour X et Y) ou juste une somme
amplificateur (pour la sortie
SUM). Le circuit que nous avons choisi est
montré ci-dessous: Fig. 2A:
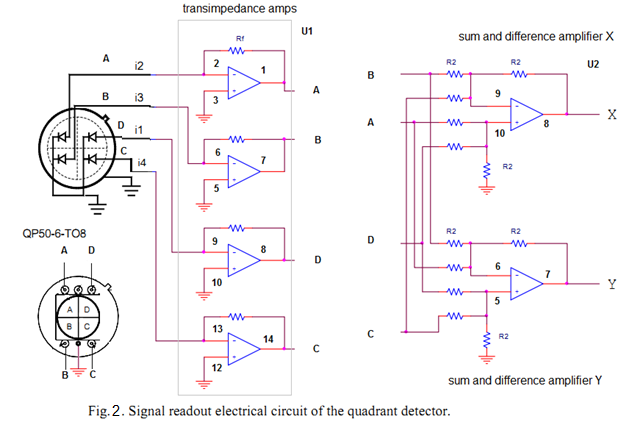
Rf = 10K, tous les autres = 20K. Les amplis op utilisés étaient le type quad TLC2264
à une tension de fonctionnement de +/- 5VDC. Les amplificateurs X et Y sont représentés
ci-dessus et se connectent aux sorties des amplificateurs de
transimpédance. L'amplificateur
SUM est représenté ci-dessous et se connecte également aux sorties des
amplificateurs de transimpédance (A, B, C, D). Fig. 2B:
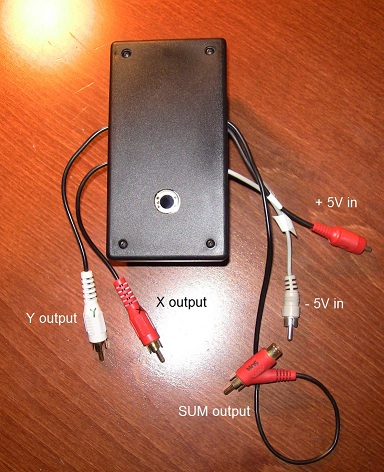
Le circuit a été assemblé et placé dans une boîte
de projet comme indiqué sur la figure 3. L'arrière de la boîte était
équipé de trous de vis filetés pour permettre le montage sur un support
cinématique Thorlabs KM100B.
Fig. 3: Le
photodétecteur 4-Quadrant complété montrant les fils de sortie de
l'amplificateur
Une fois terminé, le dispositif a été vissé sur sa
monture cinématique et placé sur une plaque de montage optique comme
indiqué sur la figure 4. Un protecteur métallique a été monté devant la
fenêtre du détecteur afin de le protéger des lumières de la pièce.
Une lentille a également été
utilisée pour focaliser le faisceau laser de la source HeNe à une
taille appropriée pour s'adapter à l'intérieur de la zone du quadrant.
Fig. 4: Gros plan du
détecteur sur la planche à pain optique.

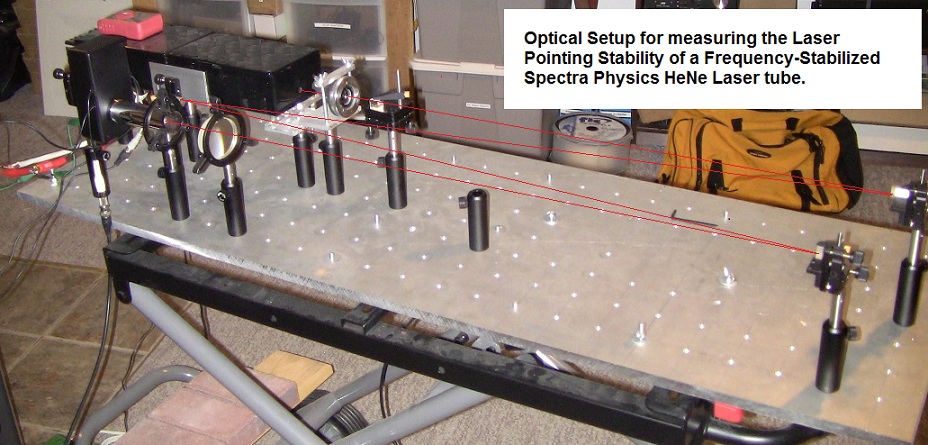
Afin de rendre l'angle de dérive le plus évident
possible, la longueur du trajet entre le laser et la photodiode
quadrant a été établie à environ 2,5 mètres de long en faisant rebondir
le faisceau entre une série de miroirs. Ceci
est illustré ci-dessous sur la figure 5. Un séparateur de faisceau
polarisant a été utilisé au début pour sélectionner une seule
polarisation du faisceau à étudier.
Fig. 5:
Enfin, un enregistreur de données de tension à 3
canaux a été utilisé pour échantillonner les sorties de photodiode
toutes les minutes et pour envoyer ces échantillons de données
directement à une feuille de calcul Excel pour un traçage ultérieur.
Cet enregistreur de données est similaire à
celui décrit dans l'article ici. En
bref, il utilise un microcontrôleur PIC16F777 et trois canaux A / N
pour collecter les données X, Y et SUM, qui sont converties en valeurs
de tension ASCII et envoyées directement à une feuille de calcul Excel
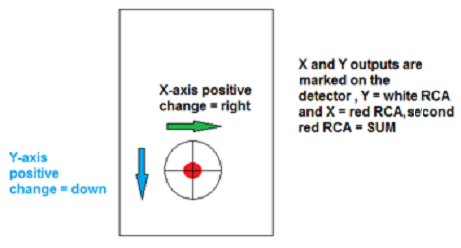
en utilisant le programme freeware PLX-DAQ de Parallax. La
convention pour la direction de la dérive et la polarité de la sortie
de données est indiquée ci-dessous:
Fig. 6: Les flèches montrent
comment interpréter les tensions X et Y comme une direction de dérive
du faisceau.
Partie
2: Mesure de la dérive réelle des faisceaux dans les tubes laser HeNe
Avant
de présenter les données recueillies à l'aide du détecteur de quadrant,
établissons d'abord quelques conventions sur la façon dont ces lasers
spécifiques fonctionnent. Nous
utilisons deux lasers HeNe construits sur mesure qui sont stabilisés en
fréquence à l'aide d'une bobine chauffante enroulée autour des tubes
laser qui est contrôlée en fonction des intensités des deux modes dans
le faisceau de déchets. Les lasers
sont décrits en détail ici. En
bref, les lasers sont interfacés avec un circuit électronique qui tente
de verrouiller la position des deux modes laser, l'un vertical et
l'autre horizontal, à une certaine position le long de leur courbe de
gain. Le
circuit laser est commandé par un potentiomètre qui peut être réglé
pour augmenter ou diminuer la quantité de chaleur appliquée au tube, et
ainsi déplacer les modes vers le haut et le bas de la courbe de gain. Ce
processus est surveillé sur un voltmètre monté sur le boîtier du laser
qui peut être ajusté en utilisant le potentiomètre de + 5VDC à -5VDC. À
+ 5VDC, le mode de polarisation verticale est au centre de la courbe de
gain (sortie maximale) et le mode horizontal est poussé du côté éloigné
(sortie minimale). A
-5VDC, la situation est inversée - le mode horizontal est proche du
centre de la courbe de gain et le mode vertical est poussé sur le côté.
Cette
opération peut être montrée graphiquement ci-dessous:
Fig.7:
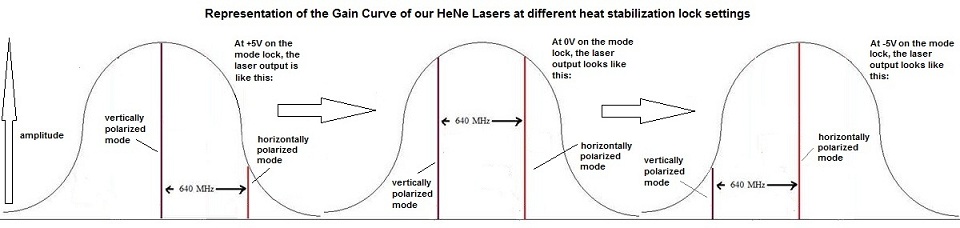
Fig.
8: Image de la commande du potentiomètre laser et du voltmètre sur
l'enceinte.

Exemple de données de dérive des tubes HeNe à
spectrométrie de stabilité stabilisée en fréquence
Quelques exemples de données sont présentés
ci-dessous pour deux tubes Spectra Physics HeNe différents (ci-après
dénommés 1 & 2) - les deux lasers présentaient des déviations
similaires de l'alignement des axes X et Y au cours des 12 premières
heures après le démarrage à froid. Les lasers
ont été allumés à 9h et 10h respectivement, ont laissé 90 à 120 minutes
pour se réchauffer, ont été verrouillés en mode, puis les mesures de
dérive ont été initiées. Dans les deux cas,
la lumière laser polarisée horizontalement seule a été mesurée au
détecteur et les lasers ont été verrouillés avec le mode horizontal à
moins de l'amplitude du mode vertical à ~ + 1v sur la tension de
verrouillage - voir la description ci-dessus.
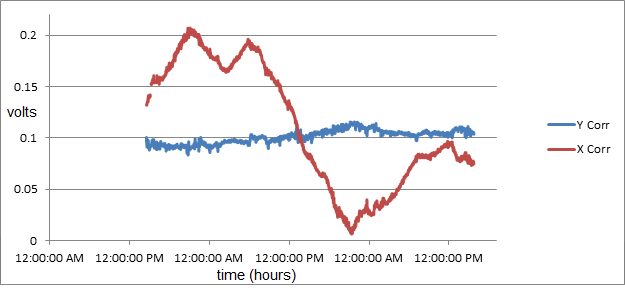
Fig. 9: Dérive du mode
horizontal de HeNe Laser 1 et 2 sur 14 heures:
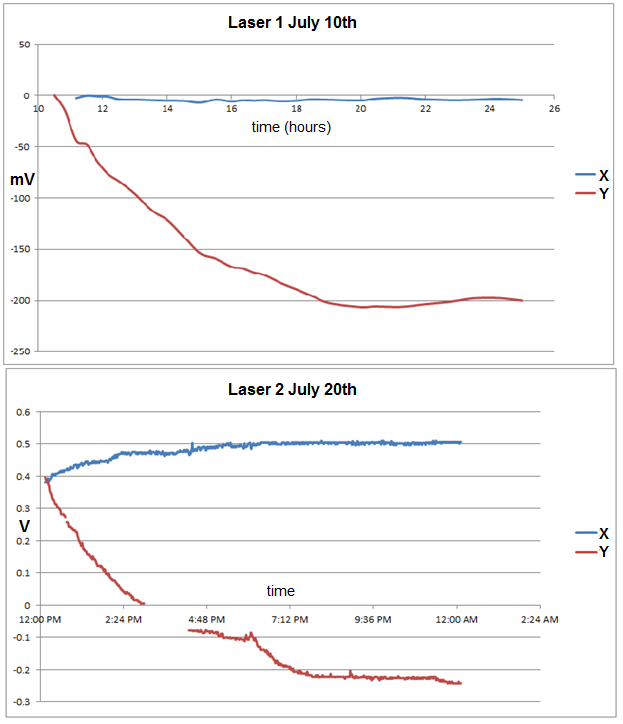
Pour déterminer le sens et l'angle de polarisation,
un filtre de polarisation a été placé dans le chemin vers le détecteur
de quadrant et ajusté jusqu'à ce que le SUM soit passé à zéro.
Ceci a montré que dans le cas du laser 2, par
exemple, le faisceau polarisé horizontalement était légèrement décalé
par rapport à l'horizontale exactement parallèle à la terre.
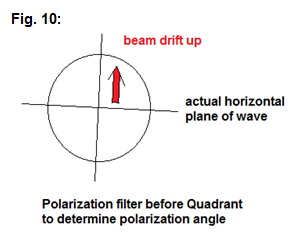
La dérive du faisceau semble être
principalement verticale et normale au plan de polarisation -
cependant, en raison de ce léger désalignement à la terre horizontale,
les données pour le laser 2 montrent également une dérive légèrement
vers la droite (dérive positive de l'axe X). (Dérive négative de l'axe Y) comme on peut le voir
dans la partie inférieure de la Fig. 9. Ceci est représenté
schématiquement ci-dessous.
Ce processus a semblé être un schéma de
stabilisation à long terme pour ces tubes Spectra Physics HeNe qui
s'étendaient habituellement sur 8 heures ou plus. Cela a souvent abouti à une diminution de la
dérive, mais dans certains cas, puis développé dans des modèles plus
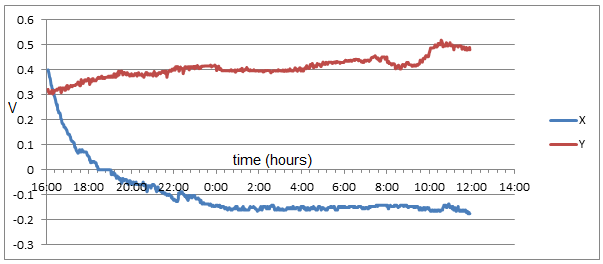
chaotiques de plus petite amplitude. Lorsque
le mode de polarisation verticale a été sélectionné, le motif de
changement de X et Y a été inversé. Ceci est
représenté ci-dessous sur la figure 11. Là encore, la plus grande
partie de la dérive se produit dans les 8 à 10 premières heures après
le démarrage du laser. La tension de
verrouillage était ~ + 1v.
Fig. 11: Dérive du
mode vertical du laser HeNe 2 après un démarrage à froid de plus de 20
heures.
Le mode vertical du faisceau semble dériver
perpendiculairement à son plan de polarisation, comme indiqué
ci-dessous, qui était légèrement décalé de la verticale de la terre et
principalement vers la gauche:
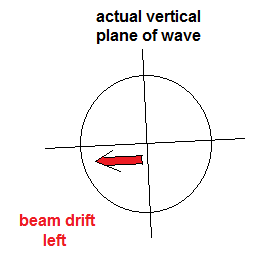
Fig 11B: Dérive liée à la température dans l'angle
du faisceau.
Il a été observé au moins une fois que longtemps
après la période initiale de stabilisation au réchauffement de 10
heures, des modèles de dérive d'amplitude plus petite apparaîtraient
comme montré ci-dessous sur la figure 12.
Fig.
12: Dérive de faible amplitude après la stabilisation
initiale du tube.
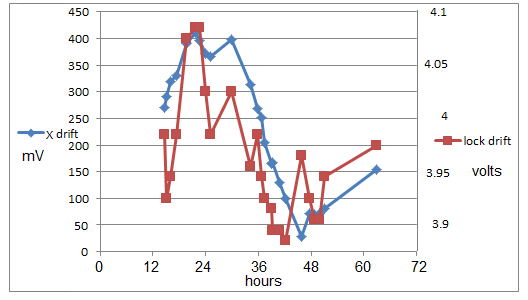
Il a été observé que cette dérive suivait un modèle
similaire à la dérive spontanée de la tension de verrouillage de mode
sur le laser, comme le montre la figure 13 ci-dessous. C'était après avoir corrigé les changements
d'intensité en normalisant les valeurs SUM de chaque lecture.
Puisque la tension de verrouillage de mode est
un composite des intensités de faisceau de déchets combinées des deux
modes, si la tension de verrouillage de mode dérive, cela signifie que
les modes dérivent également le long de la courbe de gain laser, et
c'est ce changement qui semble être faisant
que le faisceau laser change son angle de sortie d'un petit degré.
Fig.
13: Comparaison de la dérive à long terme de l'angle du
faisceau de l'axe X avec la dérive de la tension du laser.
La
cause ultime semble être les changements à long terme de la température
ambiante affectant la longueur du tube HeNe. Bien
que les tubes laser HeNe soient stabilisés en température, cette
stabilisation est flottante par rapport à la température ambiante dans
la pièce, et tout changement important de la température ambiante fait
alors pression sur le système de stabilisation pour passer à un nouveau
niveau de verrouillage. nouvelle
position des deux modes le long de la courbe de gain du laser. Ce
déplacement le long de la courbe de gain entraîne alors une
modification de l'angle de sortie du faisceau, qui est détecté dans nos
données de photodétecteurs à 4 quadrants. Afin
de tenter de prouver que le mouvement des modes sur la courbe de gain
affecte réellement l'angle de sortie du faisceau, nous avons lancé une
série de tests utilisant un enregistreur de données à 4 canaux pour
surveiller les changements des valeurs X, Y et Sum du quadrant. détecteur,
en même temps que les changements de la tension de verrouillage. L'échantillonnage
a été effectué 35 fois par seconde sur chaque canal. Dans
ces tests, le commutateur LOCK laser a été arrêté et le laser a été
démarré à froid et les modes ont été autorisés à dériver le long de la
courbe de gain, ce qu'ils font normalement dans la première heure ou
plus après le démarrage à froid. Ceci
est illustré ci-dessous sur la Fig. 14. La tension librement oscillante
sur le voltmètre est affichée en vert, montrant le basculement des
modes. La
donnée bleue est la dérive le long de l'axe X (après correction des
variations d'intensité en utilisant les valeurs de Somme) et la donnée
rouge est la dérive le long de l'axe Y après application d'une
correction similaire. Les
données résultantes semblent impliquer que le faisceau laser dérive en
fait à plusieurs reprises dans les directions X et Y lorsque les modes
balayent la courbe de gain laser, le changement le plus important se
produisant pour le mode horizontal lorsqu'il est le plus éloigné du
centre du gain. courbe.
Ceci
est vu comme des pointes des lignes bleues et rouges de la figure 14
qui s'alignent avec + 5V sur le voltmètre. Un
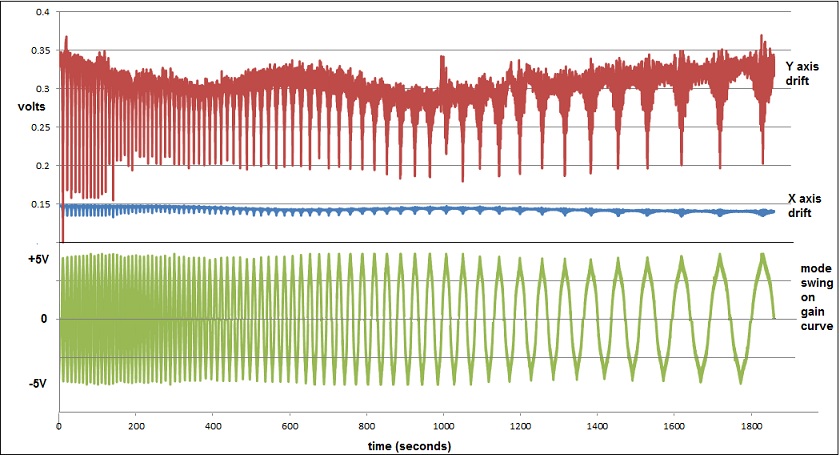
modèle similaire est observé lorsque l'échantillonnage est plus long,
comme le montre la figure 15 - l'oscillation de pointage du faisceau
est ensuite modulée par un modèle de dérive à plus longue portée,
probablement en raison des changements de température ambiante.
Fig. 14: Oscillation
apparente de la position du faisceau en X et Y due à un cycle de mode
(échantillon de 5 minutes):
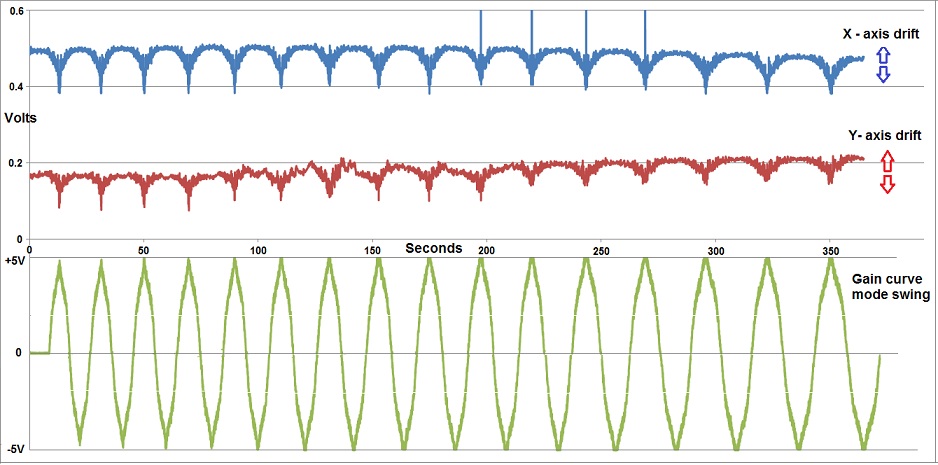
Fig. 15: Même
oscillation de la position du faisceau, maintenant plus de 35 minutes:
Pour
vérifier davantage que le cyclage de mode fait effectivement osciller
légèrement le faisceau dans son angle de sortie, une dernière
expérience a été effectuée pour essayer de capturer ce phénomène sur
vidéo. Ci-dessous
est un extrait de cette vidéo montrant le faisceau laser HeNe
(polarisation horizontale) projeté sur un écran après avoir suivi un
chemin de 2,5 m avec un certain nombre de réflexions en miroir. En
raison des réflexions multiples le long du trajet, le faisceau est
assez étendu et comporte des lignes d'interférence statique qui peuvent
être utilisées comme référence pour le mouvement du faisceau pendant le
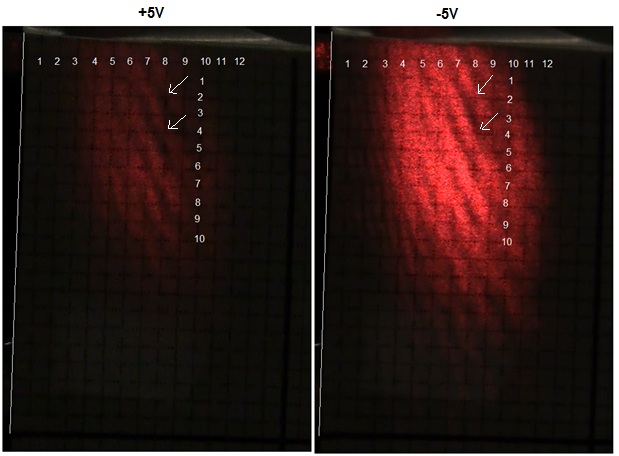
cycle du mode. Comme
on peut le voir sur la figure ci-dessous, à + 5V sur le voltmètre
(image de gauche), le mode horizontal est le plus faible et il est sur
le côté de la courbe de gain, donc l'intensité du faisceau est faible. À
-5V (image de droite), elle est la plus forte en intensité car elle est
proche du centre de la courbe de gain. En
examinant l'intensité de l'interférence sur les flèches (gauche et
droite), il est clair que les lignes d'interférence sont passées d'un
état à l'autre d'environ ¾ d'une frange - dans la vidéo, ce changement
se produit une fois par cycle de mode.
Fig. 16
– Extrait de la vidéo montrant la dérive du faisceau
pendant le cyclage du mode.
Donc,
toutes ces preuves (Fig. 13 - 16) semblent soutenir l'idée que lorsque
nos modes laser HeNe se déplacent le long de leur courbe de gain,
l'angle du faisceau de sortie change aussi légèrement. La
preuve vidéo suggère que la dérive du faisceau est de l'ordre d'une
fraction de mm à 2,5 mètres du tube laser.
Addition
Nous
avons cherché dans cet article à décrire la construction d'un circuit
photodétecteur à 4 quadrants et à l'appliquer à l'examen des modèles de
dérive d'angle de faisceau dans deux lasers HeNe stabilisés en
fréquence que nous avions sous la main. De
manière surprenante, les lasers dérivent sensiblement aussi facilement
détectés dans les variations des tensions des axes X et Y sur le
détecteur. La
principale source de la dérive semble être une relation mécanique de
l'angle du faisceau avec la position des modes laser le long de la
courbe de gain du laser. Lorsque
les modes se déplacent le long de la courbe de gain, généralement en
raison d'un changement de température et donc d'un changement dans la
longueur et / ou la forme du tube laser, chaque composante de mode du
faisceau dérive dans son angle de sortie. La
quantité de dérive et de direction est quelque peu variable et dépend
des conditions à tester, mais est généralement de l'ordre d'une
fraction de mm à 2,5 mètres du laser pour un balayage en mode complet
le long de la courbe de gain. En
outre, la quantité de changement d'angle de la composante de mode
sortant du faisceau semble être plus élevée lorsque le mode est à l'un
ou l'autre côté éloigné de la courbe de gain. L'application
d'une stabilisation de fréquence au laser à l'aide d'une bobine
chauffante enroulée autour du tube semble seulement amortir cette
dérive, probablement parce que le contrôle de la température du tube
flotte par rapport à la température ambiante. Un
remède proposé pour stabiliser l'angle du faisceau consisterait donc à
enfermer de plus les lasers à l'intérieur d'une seconde enceinte qui
régule la température de l'air dans une plage très étroite. Combiné
avec la bobine de chauffage de stabilisation primaire, cette méthode
devrait assurer que le laser maintient un angle de faisceau constant à
tout moment et que la tension de verrouillage du laser reste fixée à sa
valeur de réglage d'origine.
*******************************************
A propos de
l'auteur:
Doug Marett est un chercheur qui travaille dans
l'industrie depuis 25 ans. Après avoir reçu
son M.Sc. de l'Université de Toronto, il
s'est principalement concentré sur la conception et le développement de
nouvelles technologies et de nouveaux produits. Cela
inclut des inventions brevetées dans le secteur de la biotechnologie,
telles que de nouveaux dispositifs médicaux, et plus récemment le
développement de produits dans le domaine de l'optique et du
prototypage rapide. Il a participé à divers
projets, dont la spectroscopie RMN, la navigation inertielle et
l'interférométrie optique. Étant d'abord
expérimentaliste et théoricien, Doug Marett adhère à la philosophie
selon laquelle la recherche expérimentale devrait guider le
développement de la théorie et sa validation, et non l'inverse.
Doug Marett travaille sur une expérience de bobine
de Helmholtz, 2015.
|

|
|